智能化掘进工作面系统
一、系统简介
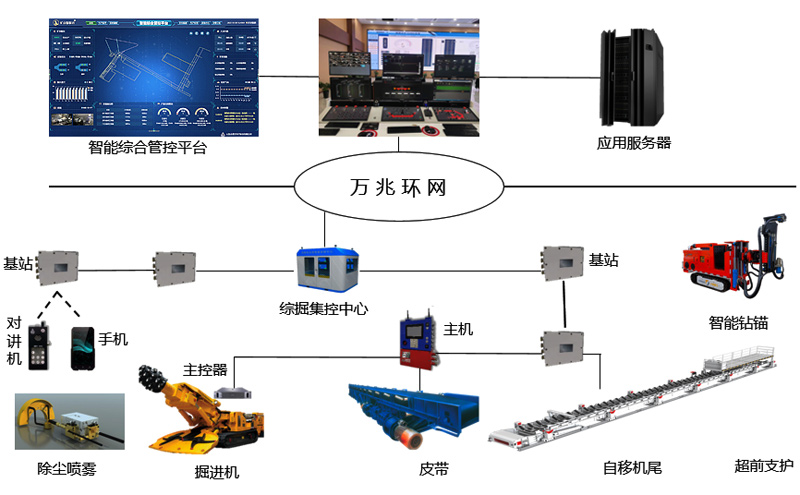
智能掘进工作面系统采用智能模糊控制和视频AI处理技术,在地面和顺槽智能化监控中心对掘进机和后路运输等掘进设备进行智能监控与可视化远程干预,实现了掘进工作面智能化、少人化作业、系统采用了针对掘进设备与作业环境的快速感知与模糊控制技术,不仅提升了智能化工作面系统的安装维护效率,也大大提高了掘进作业的智能化水平。
二、核心功能
远程控制
利用电液控技术,集控中心可以对掘进机进行控制操控。
一键启停
集中控制中心能够实现巷道掘进工作面破岩、运输等成套设备的“一键启停”控制。
工况监测
通过油压、油温、油位、水压、测距、位移传感器等,实时监测掘进机各项数据。
三维建模
三维建模技术实现数字孪生情景再现,在视线不好的情况下,可以实现盲割功能。
有线+无线
通讯系统采用无线+有线传输能确保掘进机数据传输的灵活性和可靠性。
数据处理
通过激光传感器辅助陀螺仪,实时导航掘进机定态定姿、环境及人员监测等。
自动截割
掘进设备具备自动截割功能,能够实现远程遥控截割。
视频处理
系统采用视频AI增强模糊算法,实现危险区域人员接近识别与报警功能。
三、系统组成
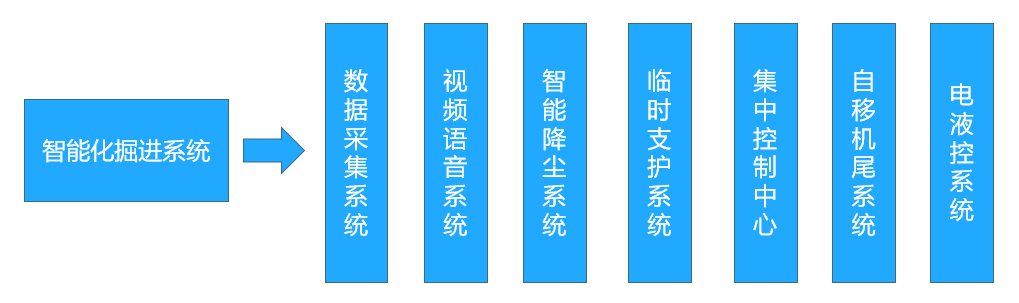
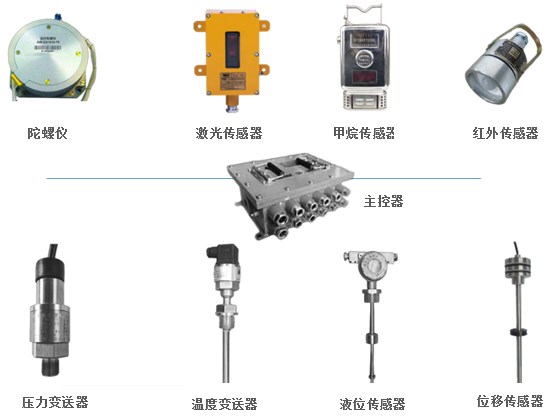
✦ 数据采集系统
- 数据采集系统共包括3部分,掘进机实时导航定态定姿、掘进机工况监测、环境及人员监测。包含了陀螺仪、激光测距传感器、位移传感器等组成。
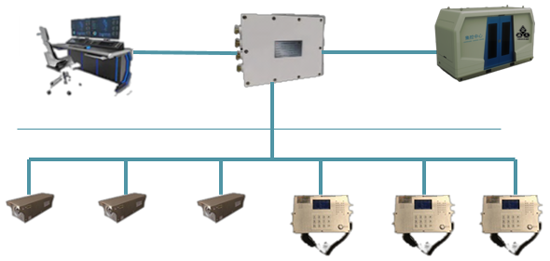
✦ 视频语音系统
- 视频系统中增加了独有的视频AI增强模糊算法,可实现视频增强功能,以达到对掘进头及生产环境进行准确识别,并通过“有线+无线”方式实现语音通话功能。
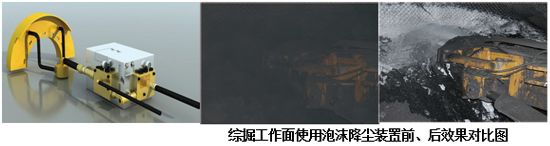
✦ 智能降尘系统
- 在防尘用水中加入定量的泡沫抑尘专用液,通过专用发泡装置,引入压风,产生高倍数泡沫,由喷嘴泡沫喷洒机构喷洒至尘源,利用泡沫良好的覆盖、湿润和黏附等特性作用于粉尘,从源头上阻止粉尘的扩散,有效降低空气中的粉尘浓度。本技术主要包含矿用泡沫抑尘设备和矿用泡沫抑尘专用液两种产品,与其他湿式抑尘技术相比具有用水量少、降尘效率高的特点。
✦ 临时支护系统
- 临时支护装置装配在掘进机的中上部,选位合理,配套简便,对掘进机的改造量很小,不干扰掘进机的运动和截割作业功能,实现了机械化支护作业,降低了工人施工劳动强度,提高了掘进效率,使锚护工人的安全得到了有效的保障。

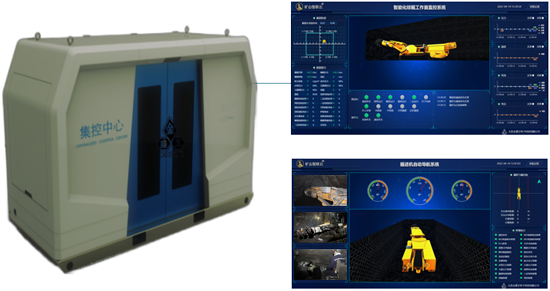
✦ 集中控制中心
- 集中控制中心能够对掘进设备、支护设备、运输设备等运行参数进行实时监测与控制;能够实现巷道掘进工作面破岩、运输等成套设备的“一键启停”控制;具备掘进工作面环境(粉尘、瓦斯等)智能监测与分析功能、智能降尘功能,并与掘进装备实现联动,具有危险区域人员接近识别与报警功能。
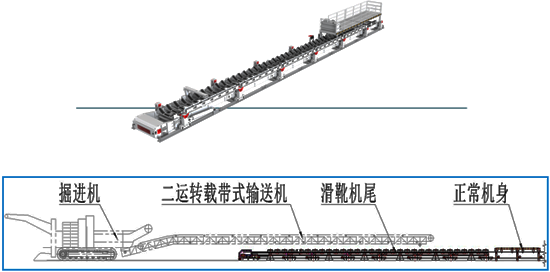
✦ 自移机尾系统
- 自移机尾主要使用于工作面桥式转载机和顺槽带式输送机的联接,该装置以自带液压站为动力,额定工作压力20MPa,其原理是利用摩擦力,互为支点,实现带式输送机的机尾自移。具有自行推移,调整皮带机跑偏及机尾和转载机头校直功能。
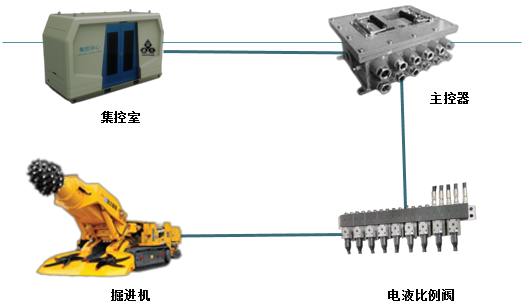
✦ 电液控系统
- 电液控制系统主要包括三部分,液压系统改造、原车电控箱改造、增加隔爆控制箱。保留掘进机原有的液控先导手柄及主阀。在主阀与液控先导手柄中间旁路电液先导比例阀,在不改动原液压控制系统的同时,实现远程控制。电液阀,应选用被改造的机型匹配的品,具有电控、液控和手动操作等功能,可实现无级调速。
 大连金盛义电子科技
大连金盛义电子科技